Dynamics in Zebulon
Zebulon has implicit dynamics with contact available. A general purpose explicit solver is in development.
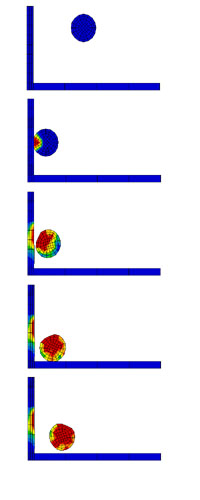 This example is of a massive (fictionally so) ball accelerated
with an applied force initially, released and left to impact
the wall. Both the wall and ball have a hardening plastic behavior.
Very carefull automatic time stepping with control on the
amount of deformation is necessary, because the plastic deformation
solution during impact has a strong influence on the post impact
path. Also it is important to use finite strain because the
ball rotates several complete times after the second impact.
This example is of a massive (fictionally so) ball accelerated
with an applied force initially, released and left to impact
the wall. Both the wall and ball have a hardening plastic behavior.
Very carefull automatic time stepping with control on the
amount of deformation is necessary, because the plastic deformation
solution during impact has a strong influence on the post impact
path. Also it is important to use finite strain because the
ball rotates several complete times after the second impact.
The input file can be seen here. Quite a few
options are used, including element formulation specified, automatic time
stepping with material control, "expiring" boundary conditions, loading
tables, multi-zone contact, output with specific variables specified,
direct curve output (during the computation, no post processing), and
multiple materials defined.
Eigen solutions
 Modal analysis is also available in Zebulon. A variety of
options are implemented, including loading a preloaded
stiffness matrix for the modal analysis. Post processing
in Zmaster allows the deformed modal profiles to be easily
visualized. At right are a couple of the modes in a plate.
Modal analysis is also available in Zebulon. A variety of
options are implemented, including loading a preloaded
stiffness matrix for the modal analysis. Post processing
in Zmaster allows the deformed modal profiles to be easily
visualized. At right are a couple of the modes in a plate.